



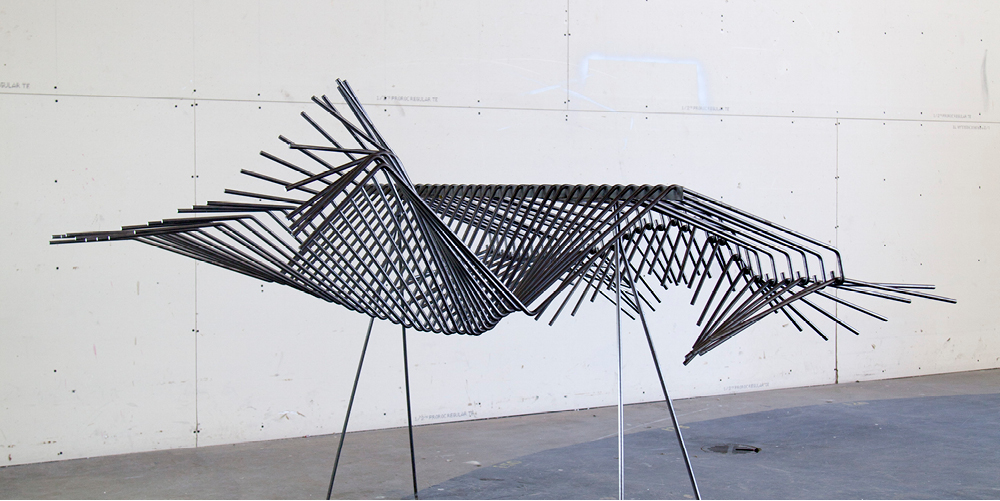








Balance Bending
Balance Bending conflates complex fabrication processes with physics computation. Defined by two input curves, the computational model calculates a series of angles and distances to ensure two realities. The first being that each rod is capable of fabrication. The second being that when composed, the rods balance each other across a single spine, thus defining a global geometry in space.
Results of the Robotic Gravity Workshop at the University of Michigan Taubman College of Architecture & Urban Planning by Brandon Clifford, Wes McGee, and Daniel Piker.